
9 Minutes
Buick Electra L7 domină testul independent de condus autonom din China — Tesla în urmă
La doar câteva zile după ce Tesla le-a comunicat investitorilor că autonomia completă este la îndemână, o competiție independentă de condus autonom din China a transmis un mesaj foarte diferit. Organizată de D1EV la Ningbo, Zhejiang, cea de-a doua ediție a China Intelligent Assisted Driving Competition a plasat SAIC-GM Buick Electra L7 pe primul loc într-un lot de 17 vehicule, în timp ce Tesla Model 3 a terminat pe un dezamăgitor loc nouă. Acest rezultat a atras atenția industriei, analiștilor și operatorilor de flote, determinând o reexaminare a strategiilor tehnologice în segmentul ADAS și condus autonom.
Traseul urban și rural de 29 de kilometri — cu 28 de semafoare, cinci puncte obligatorii (waypoints) și opt zone de testare exigente — a fost păstrat secret pentru a împiedica echipele să își adapteze sistemele la situații specifice. Organizația a folosit această metodă pentru a crea un mediu de testare neașteptat și reprezentativ pentru condițiile reale, evitând supra-specializarea soluțiilor pentru scenarii cunoscute. Metodologia a inclus evaluări de performanță pe criterii precum detectare obstacole, selecție bandă, decizie de manevră, confortul pasagerilor, numărul de preluări manuale și respectul regulilor de circulație, oferind o imagine complexă a maturității tehnologiilor.
Rezultate cheie
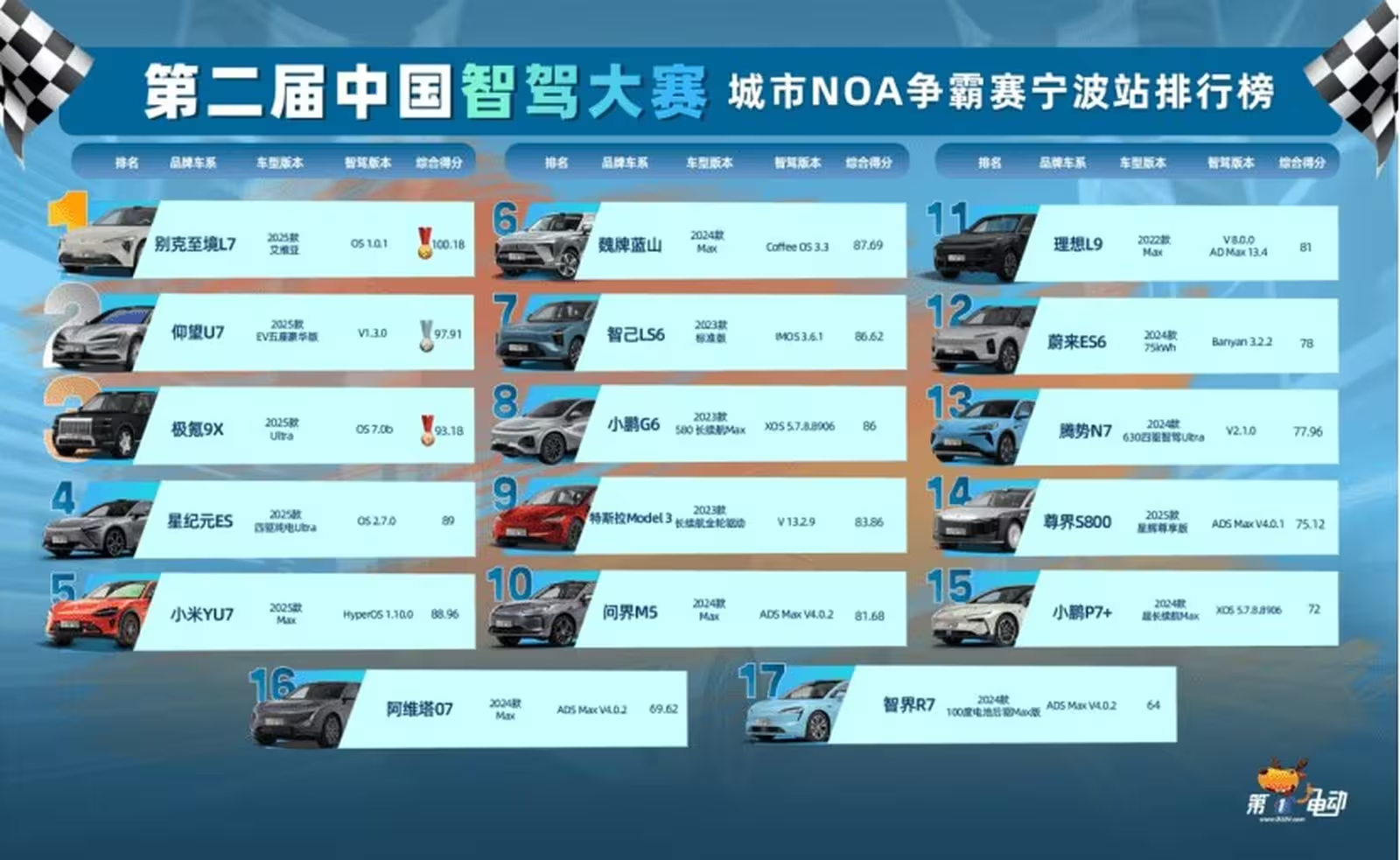
- 1st: Buick Electra L7 (SAIC-GM) — 100.18 points
- 2nd: BYD YangWang U7 — 97.91 points
- 3rd: Geely Zeekr 9X — 93.18 points
- 5th: Xiaomi YU7 — 88.96 points
- 9th: Tesla Model 3 — 83.86 points

Aceste rezultate subliniază o tendință mai amplă: în China, mulți producători auto și firme tehnologice au avansat rapid caracteristici ADAS și funcții autonome, folosind frecvent LiDAR și fuziune multisenzorială alături de hărți de înaltă precizie (HD maps) și modele AI de mari dimensiuni. Dezvoltarea integrată între hardware (LiDAR, radar, camere), software (percepție, planificare, control) și date (hărți HD, telemetrie, învățare prin demonstrație) a creat un avantaj competitiv pentru actorii care investesc masiv în stack-urile complete de autonomie. În plus, parteneriatele între OEM-uri și companii AI (de exemplu Momenta) au permis dezvoltarea și testarea rapidă a modelelor de percepție și planificare la scară largă.
De ce a câștigat Electra L7
Electra L7 este un vehicul electric cu autonomie extinsă (EREV) produs de SAIC-GM, care combină un grup propulsor eficient cu o arhitectură autonomă robustă. Esențial a fost faptul că este primul vehicul din competiție echipat cu platforma Momenta R6 Flywheel Big Model AD pentru sistemul său Navigate on Autopilot (NOA). Platforma R6 Flywheel combină un model de percepție la scară largă cu un planificator de traiectorii avansat, optimizat pentru fuziunea multisenzorială în timp real. Această arhitectură permite interpretarea mai precisă a mediului, reducând erorile de clasificare și îmbunătățind predicțiile pentru obiecte dinamice, cum ar fi pietoni sau bicicliști.
Tehnic, avantajul a venit din integrarea riguroasă a LiDAR-ului cu camerele și radarul, dar și din folosirea hărților HD pentru localizare precisă la nivel de centimetrі. Momenta R6 utilizează modele mari de învățare profundă pentru percepție și planificare, antrenate pe volume masive de date de trafic real și simulări, ceea ce permite generalizarea la scenarii necunoscute. Pe lângă performanța pură de detecție, platforma include și straturi de verificare și monitorizare a siguranței (safety monitors) care pot limita sau regla deciziile planificatorului în situații ambigue, ceea ce a redus numărul preluărilor manuale pe traseu.

Mai multe segmente de test au evidențiat acest avantaj. Un ecran din plastic transparent creat de organizatori pentru a simula un obstacol cu vizibilitate redusă a fost detectat doar de șase mașini: Li Auto L9, YangWang U7, Nio ES6, Buick Electra L7, Zeekr 9X și Xiaomi YU7 — toate echipate cu LiDAR. Sistemele bazate exclusiv pe vedere, inclusiv FSD/Intelligent Assisted Driving de la Tesla, nu au detectat acel obstacol. Acest aspect pune în lumină limitele percepției bazate doar pe camere, în special în cazul materialelor cu reflectivitate scăzută sau a suprafețelor transparente, unde LiDAR-ul și fuziunea de date generează un model tridimensional robust al scenei.
Provocările traseului și comportamentele sistemelor
Traseul a combinat alei înguste din cartiere, sensuri giratorii, întoarceri în loc cu vizibilitate redusă (U-turns), drumuri rurale și obstacole contrafăcute pentru a evalua navigația, selecția benzilor, detectarea obstacolelor și luarea deciziilor. Pe lângă aceste elemente, s-au evaluat și comportamentele în fața participanților non-cooperanți la trafic — de exemplu mașini parcate neregulamentar, pietoni care traversează în afara trecerii sau bicicliști care taie calea — pentru a reflecta complexitatea mediului urban.
- Drumuri înguste: Concepute pentru a testa precizia și evitarea; trei vehicule au solicitat preluarea de către șofer (Wey 07, Xiaomi YU7, Xpeng G6). Testul a arătat că soluțiile cu planificare conservatoare și senzori de proximitate mai sensibili își pot menține traseul fără intervenții, în timp ce sistemele mai agresive pot forța manevre care declanșează protecții și preluări manuale.
- Sensuri giratorii: Finalizate cu succes de toți participanții, demonstrând o logică de selecție a benzii îmbunătățită la nivel de piață. Aceasta reflectă progresul algoritmilor de lane-selection și al heuristiciilor implementate pentru a gestiona intrările și ieșirile multiple din sensurile giratorii.
- Întoarceri în loc cu punct mort: Au pus probleme pentru mai multe mașini; Nio ES6 și Xpeng G6 au cerut intervenții ale șoferului, în timp ce Denza N7 a deviat de la ruta planificată. Situațiile cu vizibilitate redusă și posibile obiecte ascunse au scos la iveală diferențe semnificative între sisteme în ceea ce privește strategiile de expunere și verificare a spațiului liber.
- Obstacolul transparent: Numai vehiculele cu LiDAR l-au detectat în mod fiabil. Acesta este un semnal clar că pentru anumite tipuri de hazarduri — de exemplu folii, panouri transparente, sau materiale translucide — LiDAR-ul și fuziunea cu camerele și radarul rămân esențiale.
- Ruta confuză de întoarcere: Mai multe modele au luat drumuri greșite sau au necesitat intervenții, dezvăluind slăbiciuni în raționamentul pe traseu în condiții de indicatoare ambigue. Acest lucru evidențiază importanța integrării datelor cartografice de înaltă rezoluție și a algoritmilor de raționament pe traseu (route reasoning) care pot interpreta semnale contradictorii.

Două scenarii adiționale — o intersecție cu viraj la dreapta urmată de o întoarcere în loc și un drum rural cu trafic redus — au separat și mai clar concurenții. Tesla Model 3 a reușit testul de viraj la dreapta, dar a demonstrat o consistență insuficientă pe întreg traseul, ceea ce a contribuit la clasarea sa în mijlocul plutonului. Consistența pe lanțul complet de scenarii — de la detecție la planificare și execuție — este critică pentru încrederea utilizatorilor și pentru adoptarea pe scară largă a funcțiilor NOA/ADAS în flote comerciale și servicii robotaxi.
Ce înseamnă asta pentru Tesla și piața mai largă a condusului autonom
Tesla s-a exprimat public privind direcția sa către inteligență artificială, robotaxi-uri și autonomie completă, Elon Musk promițând capacitate de condus nesupravegheat până la sfârșitul anului 2025. În America de Nord, narațiunea se concentrează adesea pe rivalitatea Tesla — Waymo, acesta din urmă operând servicii fără șofer în arii limitate. Însă piața chineză reprezintă un peisaj aglomerat și dinamic: producători locali și firme tehnologice integrează LiDAR, hărți de înaltă precizie și abordări AI bazate pe modele mari pentru a face funcțiile AD mai robuste în amestecuri complexe urbane și rurale. Această competiție accentuează faptul că strategia „vision-only” poate necesita completări cu senzori suplimentari sau parteneriate software pentru a acoperi toate cazurile de margine.
Această competiție sugerează două concluzii importante:
- Alegerea senzorilor contează. Sistemele echipate cu LiDAR au arătat avantaje clare în detectarea obstacolelor și conștiența scenariului, în special în cazul pericolelor transparente sau cu contrast redus. Radarul oferă reziliență în condiții de vreme, iar camerele aduc informații bogate despre semnalizarea rutieră; fuziunea acestor date este esențială pentru robustețe.
- Promisiunile end-to-end nu înlocuiesc performanța consecventă dovedită în scenarii variate. O demonstrație de succes sau o afirmație pentru investitori nu compensează testarea repetată și diversificată pe drumuri publice și în competiții. Operatorii și reglementatorii vor cere dovezi concrete de fiabilitate, metrici stabile și procese de validare continuă înainte de aprobări largi.
Context de piață și produs
Victoria Electra L7 consolidează credibilitatea SAIC-GM într-o piață în care consumatorii și reglementatorii pun tot mai mult accent pe siguranța ADAS și pe validarea în condiții reale. Pentru Tesla, rezultatul reprezintă un memento că abordările bazate exclusiv pe viziune au încă limitări în anumite cazuri de utilizare — în special când percepția pe bază de modele mari și fuziunea îmbunătățită cu LiDAR sunt în joc. În plus, succesul modelului echipat cu Momenta R6 subliniază importanța colaborărilor strategice între OEM-uri și furnizorii de software AI pentru a accelera maturizarea produselor.
Impactul asupra consumatorilor și companiilor de flotă este pragmatic: decizia de cumpărare nu mai este doar despre brand sau autonomie declarați, ci despre performanță demonstrată în testări independente, costuri totale de proprietate (TCO), fiabilitate software și suport pe termen lung pentru actualizări over-the-air (OTA). De asemenea, asiguratorii și autoritățile vor urmări astfel de rezultate când calculează prime și condiții de omologare.
Citat: "Electra L7 a arătat o luare de decizii constantă în diverse scenarii," a spus un observator al competiției. "Acesta este factorul care va conta pentru clienți și pentru operatorii de flote în alegerea mașinilor cu capabilități AD." Comentariul reflectă faptul că pentru cumpărători și manageri de flote, predictibilitatea și repetabilitatea comportamentului autonome contează la fel de mult ca scorurile de vârf obținute în demonstrații izolate.
Privind înainte
Ne așteptăm la noi runde de testare și demonstrații publice pe măsură ce producătorii auto își rafinează funcțiile NOA și ADAS. Momentum-ul din China va stimula probabil mai multe parteneriate între producători (OEM-uri) și firme de AI (cum este Momenta) și ar putea accelera adoptarea LiDAR în modelele din segmentele mediu și superior. Totodată, presiunea competitivă va forța optimizări în costurile senzoriale și în eficiența modelelor AI de mari dimensiuni pentru a asigura o scalabilitate comercială.
Pentru șoferi și cumpărătorii de flote, lecția este simplă: concentrați-vă pe performanța sistemelor validate în condiții reale, nu pe promisiuni. Competiții precum evenimentul D1EV sunt valoroase pentru că expun sistemele la scenarii ascunse și diverse — un indicator mai solid al pregătirii decât demonstrațiile scriptate. Evaluările continue, rapoartele independente și testele pe drumuri publice cu condiții variate vor rămâne esențiale pentru adoptarea în siguranță a tehnologiilor de conducere autonomă.
Highlights
- Event: Second China Intelligent Assisted Driving Competition, Ningbo
- Course: 29 km, 28 traffic lights, 5 waypoints, 8 test sites
- Winning tech: Momenta R6 Flywheel Big Model AD on Buick Electra L7
- Implication: LiDAR + large-model AI fusion currently outperforms vision-only solutions in complex scenarios
Pe măsură ce cursa pentru condusul autonom se încinge, câștigătorii vor fi echipele care dovedesc performanță sigură și repetabilă pe drumuri reale, imprevizibile. Acest test arată că Tesla încă are teme de lucru — cel puțin în contextul chinez — în timp ce jucătorii tradiționali și locali își consolidează avantajul cu noi arhitecturi de senzori și parteneriate AI. În final, clienții, reglementatorii și operatorii vor premia soluțiile care pot demonstra întâi robustețe și apoi scalabilitate.












Leave a Comment
Comments
No comments yet. Be the first.